定义
逆向强化学习(Inverse Reinforcement Learning,IRL)是一种机器学习方法,它试图从观察到的行为中推断出隐藏的奖励函数,这种方法的目标是找到一个奖励函数,使得智能体在执行某个任务时,其行为与观察到的行为尽可能一致,逆向强化学习的核心问题是:给定一个观察序列,如何找到一个最优的奖励函数,使得智能体在这个奖励函数下的行为与观察到的行为最接近?
原理
1、问题表述
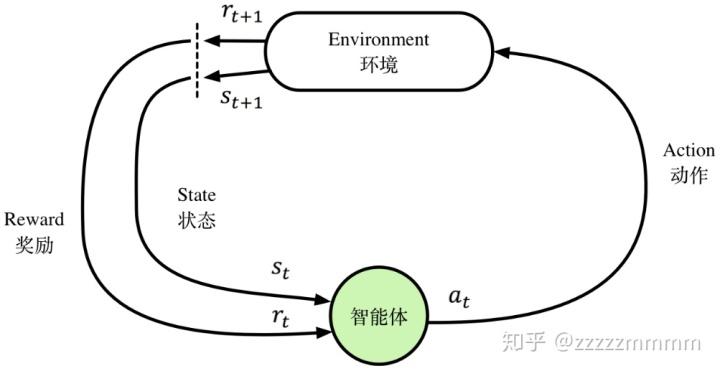
逆向强化学习的基本问题是:给定一个观察序列O = {o1, o2, …, om},其中o表示智能体在某个时刻的状态,以及一个动作序列A = {a1, a2, …, an},其中a表示智能体在每个时刻采取的动作,目标是找到一个奖励函数R,使得智能体在这个奖励函数下的行为与观察到的行为最接近。
2、优化目标
逆向强化学习的优化目标是最大化观察到的行为与预期行为的相似度,这可以通过最小化以下损失函数来实现:
L(R) = ∑∑P(o_t | O, R) * (π(o_t | O, R) α(a_t))²
P(o_t | O, R)表示在奖励函数R下,智能体在时刻t处于状态o的概率;π(o_t | O, R)表示在奖励函数R下,智能体在时刻t选择动作a的概率;α(a_t)表示在奖励函数R下,智能体在时刻t实际采取的动作。
3、算法
逆向强化学习的常用算法有最大熵IRL(MaxEnt IRL)和贝叶斯IRL(Bayesian IRL),这些算法通过迭代地更新奖励函数来最小化损失函数,直到收敛到一个最优的奖励函数。
应用
逆向强化学习在许多领域都有广泛的应用,以下是一些典型的应用场景:
1、机器人学:逆向强化学习可以帮助研究人员理解机器人在执行任务时所遵循的策略,从而设计更好的控制算法。
2、自动驾驶:逆向强化学习可以从大量的驾驶数据中学习到人类驾驶员的奖励函数,从而帮助自动驾驶系统更好地模拟人类驾驶行为。
3、人机交互:逆向强化学习可以帮助设计更符合人类习惯的交互界面,提高用户体验。
4、游戏AI:逆向强化学习可以从玩家的行为中学习到游戏的奖励函数,从而帮助游戏AI更好地适应玩家的策略。






{kind=link}
{kind=link}
{kind=link}